Si ha seguido a los robots con alguna frecuencia, sin duda se ha encontrado con el debate entre la rueda y la pata. ¿Por qué, por ejemplo, un almacén debería optar por un robot Digit con patas en lugar de un sistema Locus rodante? La explosiva popularidad de los drones ha llevado a debates similares con los vuelos. El interés reciente en la automatización del inventario ha provocado debates similares entre los UAV y los sistemas rodantes cuando se trata de manejar estantes altos.
Los robots tienden a construirse con un solo propósito en mente. Eso significa que hacen una cosa excepcionalmente bien (con suerte), pero enseñar nuevos trucos a un robot existente es difícil. El software y la IA solo pueden llegar tan lejos cuando una pieza de hardware tiene limitaciones incorporadas. Mientras tanto, construir sistemas generales o incluso multipropósito es mucho más fácil decirlo que hacerlo.
Créditos de imagen: Comunicaciones de la naturaleza
Entonces, los especialistas en robótica están haciendo lo que comúnmente hacen los especialistas en robótica: buscar inspiración en la naturaleza. Después de todo, los animales y los humanos suelen ser muy buenos adaptándose cuando la situación lo requiere. Un artículo publicado en Nature a fines de junio detalla el sistema robótico Multi-Modal Mobility Morphobot. Dado que el nombre es un trabalenguas que suena como una imitación de Teenage Mutant Ninja Turtle de finales de los 80, seguiremos su ejemplo y nos referiremos a él como M4 de ahora en adelante.
El documento detalla una gama de diferentes inspiraciones biológicas. Hay un león marino, que usa aletas para nadar y caminar; un suricato, que se para sobre sus patas traseras para comprobar si hay peligro; y el pájaro chukar (uno nuevo para mí, es una perdiz que vive principalmente en Asia y Europa), que depende de sus alas para obtener ayuda y equilibrio al subir una pendiente.
En el corazón de M4 hay un cuerpo articulado hecho de fibra de carbono y piezas impresas en 3D que permiten que su forma se adapte según sea necesario. Esto incluye cuatro rotores estilo cuadricóptero que también funcionan como ruedas.
«Para corroborar la plasticidad de locomoción reclamada en M4, realizamos varios experimentos, que incluyen locomoción sobre ruedas, vuelo, MIP, agacharse, manipulación de objetos, locomoción con patas cuadrúpedas, MIP asistido por propulsor sobre pendientes pronunciadas y dando vueltas sobre grandes obstáculos», dijo el escriben los autores del artículo. “Además, para demostrar que el diseño de M4 es escalable y puede lograr capacidades de carga útil que admiten operaciones autónomas, probamos la planificación de ruta multimodal completamente autónoma utilizando sensores y computadoras a bordo en M4”.
El equipo instaló carreras de obstáculos que requieren que M4 se adapte sobre la marcha. Las formas específicas se basan completamente en el terreno, pero hay otros factores en juego. Por ejemplo, volar es la forma más sencilla de subir una pendiente, pero requiere mucha más potencia que rodar. En ese caso, el sistema utiliza ambos modos: subir la rampa sobre dos ruedas, mientras que dos rotores ayudan en el movimiento (ver: pájaro chukar).
Créditos de imagen: Comunicaciones de la naturaleza
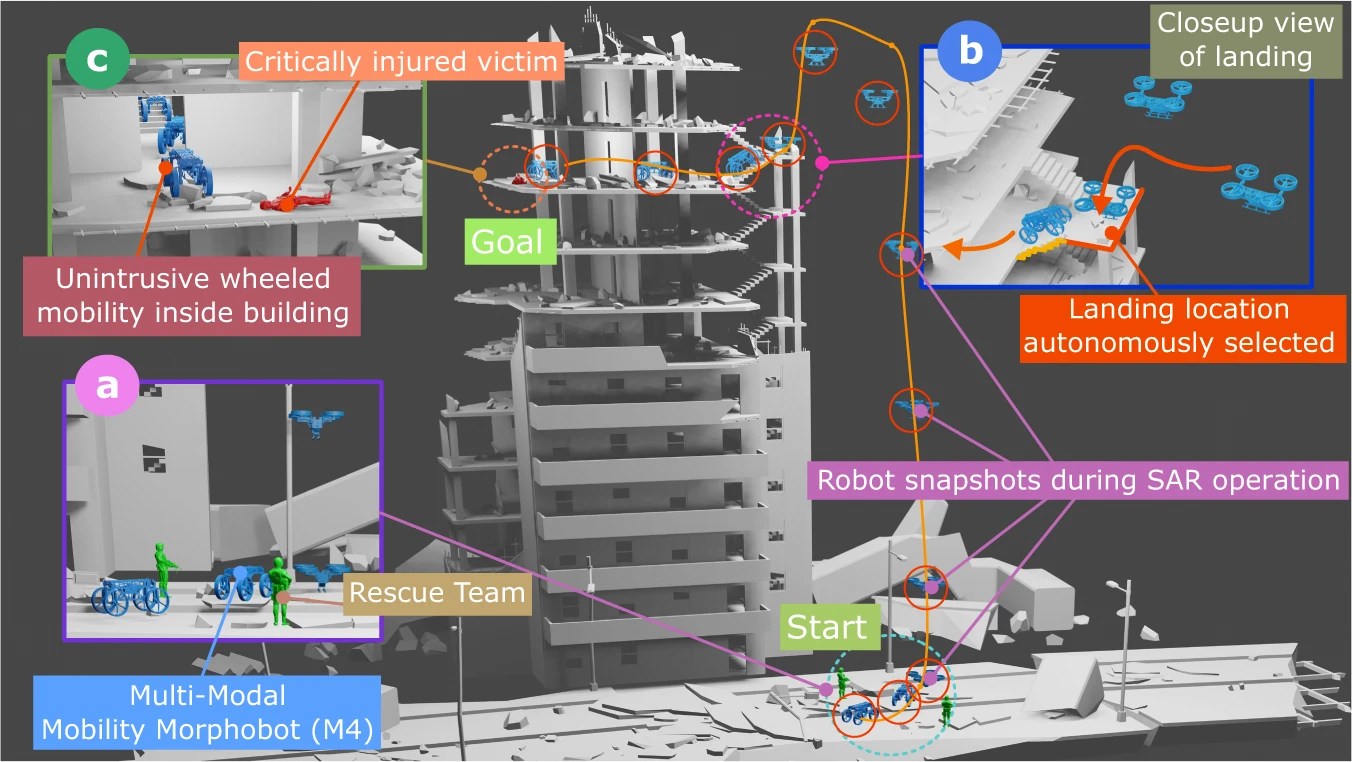
Es un diseño inteligente, aunque probablemente sea excesivo en muchas situaciones. Hay muchas tareas que se pueden ejecutar sin problemas con solo ruedas, rotores o patas en las que confiar. El equipo apunta a las misiones de búsqueda y rescate después de desastres naturales como terremotos e inundaciones como una aplicación potencial.
“Después de incidentes únicos como inundaciones, un evento puede acompañar a otro que destruya el paisaje de manera diferente”, según el periódico. “Un huracán puede producir inundaciones y daños por viento en carreteras y edificios. O bien, un deslizamiento de tierra puede provocar el movimiento de una gran masa rocosa por una pendiente, formar una presa en un río y crear una inundación. En estos escenarios, M4 puede aprovechar su versatilidad para lograr una movilidad que se adapte a los diversos requisitos de las misiones de búsqueda y rescate”.