De todos los santos griales de la robótica, el aprendizaje bien puede ser el más sagrado. Sin embargo, en una era en la que el término “propósito general” se utiliza con gran abandono, puede resultar difícil para los no robóticos comprender lo que los sistemas actuales pueden (y no pueden) hacer. La verdad es que la mayoría de los robots hoy en día están diseñados para hacer una cosa (o un par, si tienes suerte) realmente bien.
Es una verdad que abarca toda la industria, desde el robot aspirador más humilde hasta el sistema industrial más avanzado. Entonces, ¿cómo hacemos la transición de la robótica de propósito único a la robótica de propósito general? Seguramente habrá muchas paradas en terrenos polivalentes a lo largo del camino.
La respuesta es, por supuesto, el aprendizaje de robots. Ingrese a casi cualquier laboratorio de investigación de robótica hoy en día y encontrará equipos trabajando para abordar el problema. Lo mismo se aplica también a las nuevas empresas y las corporaciones. Mire a las empresas Viam e Intrinsic, que están trabajando para reducir el listón de entrada para la programación de robots.
Las soluciones abarcan una gama bastante amplia en este momento, pero cada vez me resulta más claro que este es un problema que no se solucionará con una sola solución milagrosa. Más bien, construir sistemas más complejos y capaces implicará casi con seguridad una combinación de soluciones. Sin embargo, para la mayoría de ellos es fundamental la necesidad de un gran conjunto de datos compartidos.
El equipo de robótica DeepMind de Google anunció esta semana el trabajo que ha realizado con 33 institutos de investigación diseñados para crear una base de datos masiva y compartida llamada Open X-Embodiment. Los investigadores detrás del proyecto lo comparan con ImageNet, una base de datos de más de 14 millones de imágenes que data de 2009.
«Así como ImageNet impulsó la investigación en visión por computadora, creemos que Open X-Embodiment puede hacer lo mismo para avanzar en la robótica», señalan los investigadores de DeepMind, Quan Vuong y Pannag Sanketi. «Construir un conjunto de datos de diversas demostraciones de robots es el paso clave para entrenar un modelo generalista que pueda controlar muchos tipos diferentes de robots, seguir diversas instrucciones, realizar razonamientos básicos sobre tareas complejas y generalizar de manera efectiva».
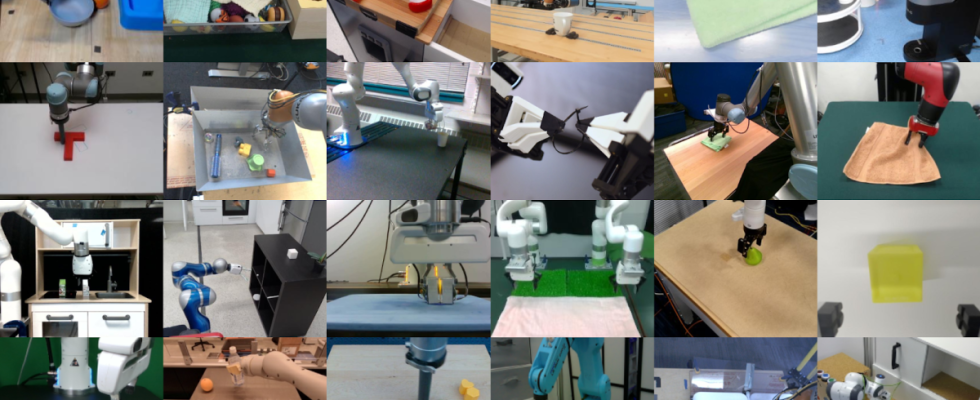
Añaden que una tarea de este tipo es demasiado grande para confiarla a un solo laboratorio. La base de datos presenta más de 500 habilidades y 150.000 tareas extraídas de 22 tipos de robots diferentes. Como lo implica la parte «Abierto» del nombre, sus creadores están poniendo los datos a disposición de la comunidad de investigación.
«Esperamos que el acceso abierto a los datos y el suministro de modelos seguros pero limitados reduzcan las barreras y aceleren la investigación», añade el equipo. «El futuro de la robótica depende de permitir que los robots aprendan unos de otros y, lo más importante, de permitir que los investigadores aprendan unos de otros».