¿Por qué no hay más robots en los hogares? Esta es una pregunta sorprendentemente compleja, y nuestros hogares son lugares sorprendentemente complejos. Una gran parte de la razón por la cual los sistemas autónomos prosperan primero en los almacenes y las plantas de producción es la relativa facilidad de navegar en un entorno estructurado. Claro, la mayoría de los sistemas aún requieren que se mapee un espacio antes de comenzar a trabajar, pero una vez que está en su lugar, tiende a haber poca variación.
Las casas, por otro lado, son una especie de pesadilla. No solo varían drásticamente de una unidad a otra, sino que están llenos de obstáculos hostiles y tienden a ser bastante dinámicos, ya que los muebles se mueven o las cosas se dejan en el piso. Las aspiradoras son los robots más frecuentes en el hogar y aún se están perfeccionando después de décadas en el mercado.
Esta semana, los investigadores de MIT CSAIL están presentando PIGINet (Planes, imágenes, objetivos y hechos iniciales), que está diseñado para llevar la planificación de tareas y movimientos a los sistemas robóticos domésticos. La red neuronal está diseñada para ayudar a optimizar su capacidad para crear planes de acción en diferentes entornos.
MIT explica PIGINet así:
[I]Emplea un codificador transformador, un modelo versátil y de última generación diseñado para operar en secuencias de datos. La secuencia de entrada, en este caso, es información sobre qué plan de tareas está considerando, imágenes del entorno y codificaciones simbólicas del estado inicial y la meta deseada. El codificador combina los planes de tareas, la imagen y el texto para generar una predicción sobre la viabilidad del plan de tareas seleccionado.
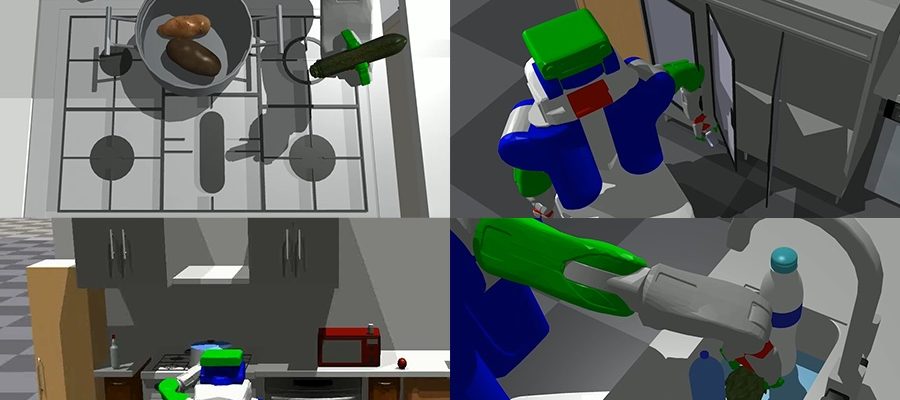
El sistema se centra en gran medida en las actividades basadas en la cocina en la actualidad. Se basa en entornos domésticos simulados para crear planes que requieren interacciones con varios elementos diferentes del entorno, como mostradores, gabinetes, el refrigerador, fregaderos, etc. Los investigadores dicen que en escenarios más simples, PIGINet pudo reducir el tiempo de planificación en un 80 %. . Para situaciones más complejas, ese número fue generalmente alrededor del 20-50%.
El equipo sugiere que las casas son solo el comienzo.
“Las aplicaciones prácticas de PIGINet no se limitan a los hogares”, dice el estudiante de doctorado Zhutian Yang. “Nuestro objetivo futuro es refinar aún más PIGINet para sugerir planes de tareas alternativos después de identificar acciones no factibles, lo que acelerará aún más la generación de planes de tareas factibles sin la necesidad de grandes conjuntos de datos para entrenar a un planificador de propósito general desde cero. Creemos que esto podría revolucionar la forma en que se entrenan los robots durante el desarrollo y luego se aplican a los hogares de todos”.