
Malas noticias si quieres mudarte a la Luna o a Marte: es un poco difícil conseguir vivienda. Afortunadamente, la NASA (como siempre) está pensando en el futuro y acaba de mostrar una estructura robótica autoensamblable que podría ser una parte crucial para salir del planeta.
Publicado hoy en Science Robotics, el artículo del Centro de Investigación Ames de la NASA describe la creación y prueba de lo que llaman «metamateriales mecánicos autorreprogramables», que es una forma muy precisa de describir un edificio que se construye a sí mismo. El acrónimo inevitable para esto es «Sistemas de ensamblaje digital adaptativo de misión reconfigurable automatizado» o ARMADAS.
«Creemos que este tipo de tecnología de construcción puede servir para muchas aplicaciones muy generales», dijo a TechCrunch la autora principal Christine Gregg. “A corto plazo, la robusta autonomía y las estructuras livianas de nuestro enfoque benefician enormemente las aplicaciones en entornos austeros, como la superficie lunar o el espacio. Esto incluye la construcción en la superficie lunar de torres de comunicación y refugios, que serán necesarios antes de que lleguen los astronautas, así como estructuras en órbita como brazos y antenas”.
La idea básica de la estructura de autoconstrucción es una sinergia inteligente entre el material de construcción (marcos cuboctaédricos que llaman vóxeles) y los dos tipos de robots que los ensamblan.
Un tipo de robot camina a lo largo de la superficie con dos piernas, aparentemente inspirado en las moléculas de transporte de cinesina de nuestra propia biología, y lleva un vóxel como una mochila. Una vez instalado, un robot de fijación que vive en el marco como un gusano se desliza y aprieta los puntos de fijación reversibles. Ninguno de los dos necesita un sistema de detección potente y la forma en que funcionan significa que tampoco se requiere una alta precisión.
Puedes ver un par de andadores y un gusano sujetador en la mayoría de las imágenes de esta publicación. Y aquí hay un andador de transporte entregando un vóxel a un andador de colocación, con el robot sujetador acechando debajo esperando para pasar y bloquear el marco en su posición.
Dos robots intercambian un elemento estructural mientras un tercero espera debajo para fijarlo a la celosía. Créditos de imagen: NASA
La forma de las piezas permite fijarlas en varios ángulos manteniendo una buena resistencia de la estructura. Probablemente no quieras almacenar rocas encima de una cúpula hecha con estas cosas, pero serían excelentes como base sobre la cual agregar aislamiento y sellador para construir una vivienda.
«Creemos que este tipo de construcción es particularmente adecuado para infraestructuras de larga duración y/o muy grandes, incluidos hábitats, instrumentación o cualquier otra infraestructura en órbita o la superficie de la luna (torres de servicios públicos, instalaciones de aterrizaje de vehículos)», dijo el coautor Kenneth Cheung. “Para nosotros, las estructuras y todos los sistemas robóticos son recursos optimizables en el espacio y el tiempo. Parece que siempre habrá situaciones en las que lo óptimo es dejar solo la estructura en su lugar (y tal vez visitarla periódicamente para inspeccionarla con un robot), así que comenzamos con eso”.
Las piezas mismas también podrían construirse en el sitio, señaló Gregg:
“Los vóxeles se pueden fabricar a partir de muchos materiales y procesos de fabricación diferentes. Con el tiempo, para aplicaciones espaciales, nos gustaría crear vóxeles a partir de materiales que encontremos in situ en la Luna u otros cuerpos planetarios”.
Por supuesto, estos vídeos de los robots trabajando están muy acelerados, pero a diferencia del trabajo en una fábrica o en una acera, la velocidad no es necesariamente esencial cuando se trata de construir cosas en el espacio o en la superficie de otro planeta.
“Nuestros robots pueden trabajar más rápido de lo que se muestra en este documento, pero no consideramos que fuera fundamental para los objetivos principales obligarlos a hacerlo. Fundamentalmente, la forma de hacer que este sistema funcione más rápido es utilizar más robots”, afirmó Cheung. «La estrategia general para la escalabilidad (de velocidad, tamaño) es poder trasladar la complejidad de la escala a los algoritmos, para planificar y programar, así como para detectar fallas y realizar reparaciones».
Los robots desarrollados por el laboratorio tomaron 256 vóxeles y los ensamblaron en una estructura de refugio transitable durante un total de 4,2 días de trabajo. Así es como se vio el comienzo (nuevamente, ni mucho menos en tiempo real):
Créditos de imagen: NASA
Si los hubiéramos enviado a Marte o a la Luna un año antes que la tripulación, podrían construir una docena de estructuras de este tipo dos veces más grandes con tiempo de sobra. O tal vez podrían colocar el revestimiento necesario en el exterior después y sellarlo; eso está más allá del alcance del artículo publicado hoy, pero es el siguiente paso obvio.
Aunque los robots tienen cables que les suministran energía en este entorno de laboratorio, están siendo diseñados teniendo en mente el funcionamiento con batería o la energía en el sitio. El robot sujetador ya funciona con baterías y los investigadores están considerando formas de mantener los andadores cargados entre operaciones o incluso durante ellas.
“Prevemos que los robots podrían recargarse de forma autónoma en las centrales eléctricas o incluso transmitir energía de forma inalámbrica. Como mencionaste, la energía también podría dirigirse a través de la propia estructura, lo que podría ser útil para equipar la estructura y alimentar a los robots”, dijo Gregg.
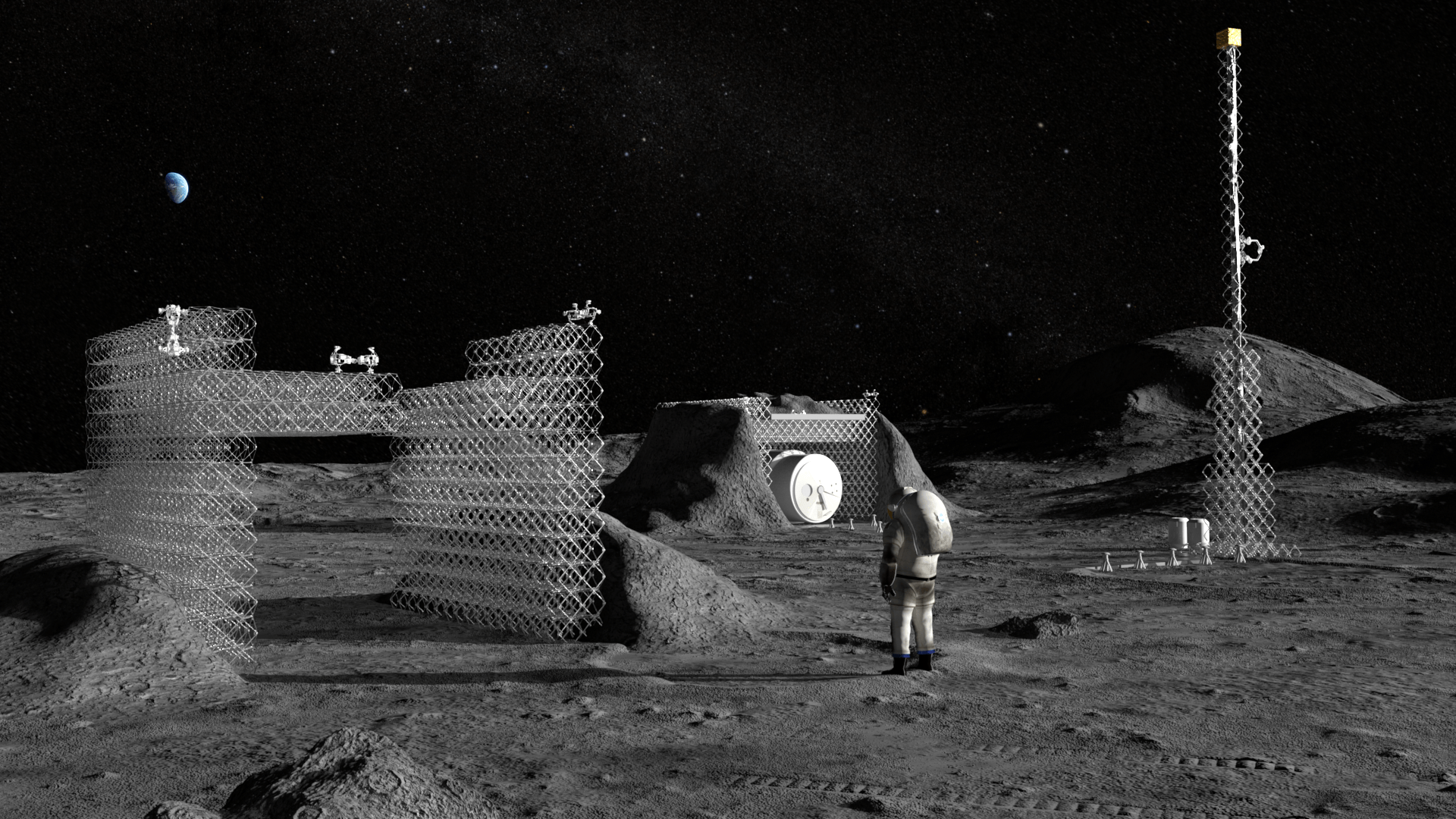
Ilustración conceptual del edificio ARMADAS bajo la supervisión de astronautas. Créditos de imagen: NASA
Versiones del robot ya han volado en el espacio y trabajado en microgravedad, así que no te preocupes al respecto. Y, en principio, no hay nada que les impida trabajar en gravedades no terrestres como la de la Luna. Dicho esto, esto es sólo el comienzo, como revelar la existencia de 2×4 y clavos. Hay más información sobre el potencial y las ilustraciones conceptuales de lo que podrían construir en esta publicación de noticias de la NASA.
“Las próximas versiones de nuestros robots para el entorno de laboratorio serán más rápidas y confiables, según las lecciones aprendidas con las primeras versiones. Estamos muy interesados en comprender cómo se pueden integrar diferentes tipos de bloques de construcción en las estructuras para proporcionar un equipamiento funcional”, dijo Gregg.
Asimismo, continuarán las investigaciones sobre estructuras que emplean enjambres de robots, no sólo un puñado; un refugio tosco podría llevar a dos caminantes cuatro días, pero algo 10 veces más grande podría tardar 100 veces más. Pero muchas manos, especialmente las robóticas, facilitan el trabajo.