
Jeff Cárdenas tira su MacBook. El cofundador y director ejecutivo de Apptronik tiene una presentación de diapositivas que quiere mostrar, repasando los siete años de historia de la startup de Austin. De hecho, requiere un poco de contextualización. Al igual que muchas otras empresas de robótica, la empresa fue impulsada por contratos gubernamentales en sus primeros días.
Primero fue Valkyrie 2, la segunda iteración del robot espacial humanoide de la NASA. La joven empresa fue una de las pocas encargadas de ayudar a dar vida a ese sistema. Su contribución al rompecabezas fueron los actuadores robóticos refrigerados por líquido desarrollados en el laboratorio Human Centered Robots de la Universidad de Texas, dirigido por el cofundador y científico jefe de Apptronik, Luis Sentis.
El siguiente fue exoesqueletos. Comando de Operaciones Especiales de los Estados Unidos (USSOCOM), que estaba en el mercado de «trajes de hombre de hierro».
Créditos de imagen: Brian Calentador
“[The]el exoesqueleto se enfrió con líquido”, dice Cárdenas. “Aprendimos mucho haciendo eso. La complejidad del sistema era demasiado alta. fue pesado Remotizamos todos los actuadores. Y luego empezamos a darnos cuenta de cuál era la versión más simple de un robot humanoide: un manipulador móvil. Empezamos a ser abordados por mucha gente de logística, que no quería pagar por la fabricación de armas. Eran demasiado precisos para lo que necesitaban. Lo que querían era un brazo logístico robótico asequible”.
Las armas industriales han sido, de lejos, la punta de lanza, habiendo existido durante aproximadamente 60 años. En ese tiempo, fabricantes como Fanuc y Kuka han diseñado precisión milimétrica. Eso es algo que es esencial para la fabricación y excesivo para la mayoría del trabajo de logística. Instalar sistemas eléctricos en automóviles, por ejemplo, requiere mucha más precisión que mover una caja del punto a al punto b.
“Lo que mucha gente está haciendo con los robots humanoides es básicamente tratar de construirlos de la misma manera que hemos construido brazos robóticos industriales durante mucho tiempo”, dice Cárdenas. “Una de las ideas clave para Apptronik es que la forma en que necesitamos construir estos robots, cuando tienes un sistema de 30 grados de libertad, es fundamentalmente diferente. Las cosas que necesitamos son diferentes. Necesitamos que estén seguros alrededor de los humanos, necesitamos que sean muy resistentes al entorno en el que se encuentran. Necesitamos que sean altamente eficientes energéticamente. Es un nuevo conjunto de restricciones que estamos tratando de optimizar. Tomando las mismas arquitecturas de todos los brazos que ves por ahí [at Automate] y extrapolar eso no tiene sentido. Esta es una arquitectura fundamentalmente diferente en la que tenemos alrededor de un tercio menos de componentes por actuador, toma alrededor de un tercio del tiempo de montaje”.
Créditos de imagen: Apptronik
Por varias razones, la logística es un lugar lógico para que aterrice una empresa como Apptronik. No todos quieren ser sostenidos por contratos gubernamentales para siempre. En los últimos años, la logística/cumplimiento se ha convertido en la categoría más popular en el espacio de la robótica. Al igual que muchas otras empresas que han pasado de la investigación al mundo de los productos comerciales, la empresa ha tenido que determinar si existía el mercado adecuado para la tecnología que estaba creando.
“El objetivo era llegar al humanoide”, dice Cárdenas. “El humanoide es una especie de santo grial. Probablemente lo único que fue consistente cuando empezamos fue, ‘No hagas humanoides. Son demasiado complicados. ”
El verdadero valor de los robots humanoides en el lugar de trabajo sigue siendo una pregunta abierta. Pero al menos, Apptronik no es el único que lo pregunta. El muy publicitado anuncio de Optimus de Tesla sacudió algo suelto. De repente, las empresas que habían estado operando en modo sigiloso se sintieron obligadas a anunciar sus propias intenciones. Startups como 1X y Figure han discutido su progreso en diferentes grados. Sanctuary AI, que se ha asociado con el hardware de Apptronik, ya ha comenzado a probar sistemas.
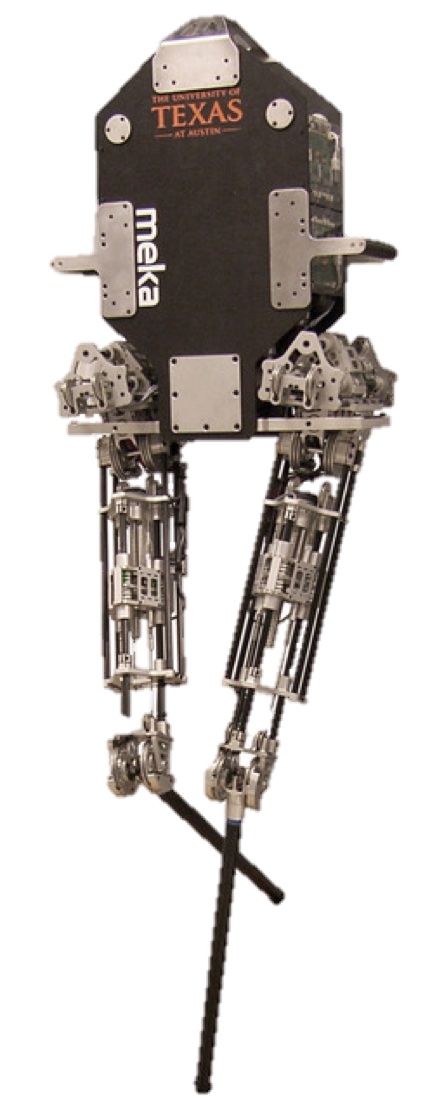
Apptronik, por su parte, ha mostrado hasta ahora dos mitades de un robot. Está Astra, la parte superior del cuerpo de un robot humanoide, que se puede montar en un robot móvil autónomo (AMR). En el otro extremo está Draco, que literalmente es todo piernas. La compañía se refiere a él como su «primer bípedo», lo cual es cierto, pero eso es todo lo que hay.
Parte de nuestra presentación de diapositivas improvisada son videos de las piernas delgadas caminando por los laboratorios de Apptronik. No ha alcanzado las velocidades de Cassie por su apariencia, pero al mirarlo simplemente a simple vista, el paso parece más rápido que lo que Tesla mostró en sus videos recientes de Optimus. Lo que queda claro después de ver un puñado de estos proyectos aparentemente dispares es que Apptronik ha estado construyendo su propio robot humanoide completo pieza por pieza desde el principio.

Créditos de imagen: Apptronik
Cárdenas dice que la empresa se puso en marcha durante gran parte de su existencia, hasta llegar a unas 40-50 personas. Explorará una Serie A este año, luego de la presentación oficial de su sistema humanoide completo este verano. “Tenemos todos estos componentes básicos”, agrega. “Mucho de esto ha sido iterar y probar nuevas ideas. La ventaja de hacer bootstrapping es que hemos creído en esto durante mucho tiempo. Hemos estado en esto ahora durante aproximadamente una década como equipo, desde Valkyrie”.
Por el momento, la compañía está trabajando en caminar y desarrollar la funcionalidad central del robot antes del lanzamiento. Es comprensible que quiera demostrar que el producto realmente funciona según lo planeado antes de mostrárselo al mundo. Es un enfoque marcadamente diferente a lo que Tesla ha estado haciendo con Optimus, y si todo sale según lo planeado, impulsará a la empresa a su próximo gran aumento.
Cardenas me muestra imágenes, tanto renders como fotos, de Apollo, el sistema que planea debutar este verano. No puedo compartirlos aquí, pero puedo decirles que el diseño contrasta con el tipo de evolución convergente que he descrito, que encontró que Tesla, Figure y 1X respaldado por OpenAI mostraban renderizados con un lenguaje de diseño compartido. Apolo se ve, en una palabra, más amigable que cualquiera de estos sistemas y el robot Valkyrie de la NASA que lo precedió.
Comparte muchas más cualidades de diseño con Astra. De hecho, incluso podría llegar a describirlo como una estética de dibujos animados, con una cabeza con forma de iMac de la vieja escuela y una combinación de ojos de botón y pantalla que componen la cara. Si bien es cierto que la mayoría de las personas no interactuarán con estos sistemas, que están diseñados para funcionar en lugares como almacenes y plantas de producción, no es necesario abrazar lo siniestro por verse bien.
De alguna manera, la parte de propósito general es más difícil que la parte humanoide. Eso no quiere decir que construir un robot bípedo totalmente móvil y articulado sea fácil ni mucho menos, pero hay un gran abismo entre el propósito especial y el general. La definición precisa de este último es una conversación para otro día, pero para muchos, la etiqueta describe un sistema que es totalmente adaptable sobre la marcha. Para algunos, eso significa algo así como una API y una tienda de aplicaciones para que los desarrolladores externos creen habilidades, pero los sistemas aún tienen que adaptarse a su entorno. Idealmente, es una máquina que puede hacer cualquier tarea que un humano pueda hacer.
Con demasiada frecuencia, las personas no reconocen el vasto término medio que son los sistemas multipropósito. Por el momento, este es un lugar mucho más pragmático para operar. La noción de Tesla de un robot que puede trabajar en la fábrica todo el día, hacer las compras y volver a casa y preparar la cena alimenta las extravagantes expectativas existentes que han sido alimentadas por décadas de ciencia ficción.
«Para lograr que haga varias cosas», dice Cárdenas, «todavía es pronto, pero hay suficientes aplicaciones en las que si podemos hacer cosas simples como mover una caja del punto a al punto b, hay decenas de miles de unidades». valor de las demandas para esas aplicaciones.”
Como todo trabajo en el espacio, estas conversaciones requieren la advertencia de que todavía estamos en las primeras etapas. Podría decirse que la agilidad ha llegado más lejos en términos de probar la eficacia de un robot humanoide (o al menos bípedo) en un entorno de almacén. Pero incluso ellos tienen un largo camino por recorrer.
De todos modos, los próximos años ofrecerán una visión fascinante de hacia dónde se dirigen estas culminaciones de décadas de investigación.